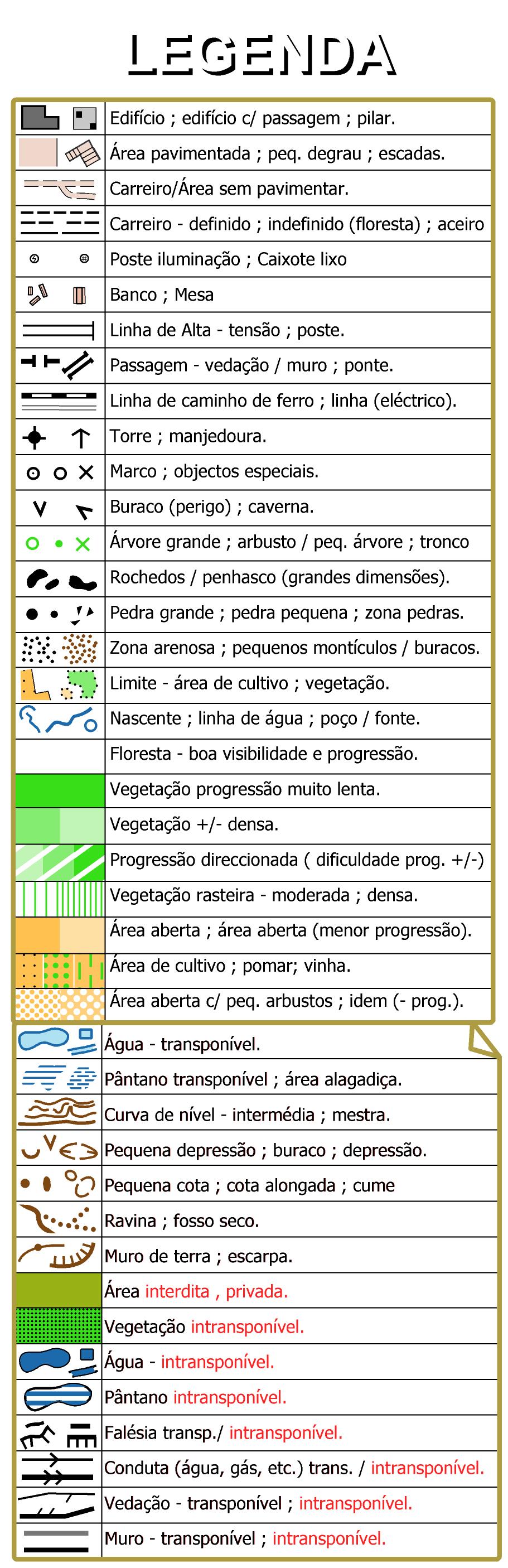
Simbologia do mapa

Os elementos do mapa estão classificados em cinco categorias: relevo; terreno rochoso e pedras; água e pântanos; vegetação; elementos construídos. Para além destes, existem também os símbolos utilizados para os percursos que, ao nível das especificações oficiais, são considerados como símbolos dos mapas.
Relevo (castanho)
A forma do terreno é representada a castanho por curvas de nível detalhadas e por alguns símbolos especiais para representar cotas, depressões, etc. O relevo é complementado a preto com os símbolos para rochas e falésias.
Terreno rochoso e pedras (preto + cinzento)
A inclusão das rochas é útil para avaliar perigos e velocidades de progressão. Fornece também elementos para uma melhor leitura do mapa e para pontos de controlo. As rochas são representadas a preto para se distinguirem de outros elementos de relevo.
Água e pântanos (azul)
Este grupo inclui zonas aquáticas e tipos especiais de terreno criados pela presença de água (pântanos). A classificação é importante visto que indica o grau de dificuldade que se apresenta perante o orientista e fornece elementos (poços, nascentes e outros) para a leitura do mapa e para pontos de controlo.
Vegetação (verde + amarelo)
A representação da vegetação é importante para o orientista porque indica a velocidade de progressão e a visibilidade, fornecendo também elementos (árvores, troncos, etc) para a leitura do mapa.
Elementos construídos (preto)
A rede de caminhos fornece informação importante ao orientista e a sua classificação deve ser facilmente reconhecível no mapa. É particularmente importante a classificação de trilhos menores. Deve ser considerada não apenas a largura mas também a visibilidade do caminho para o orientista. Outros elementos construídos (casas, vedações, etc), são também importantes tanto para a leitura do mapa como para a colocação de pontos de controlo.
Símbolos dos percursos (magenta)
Conjunto de símbolos utilizados para a representação do percurso no mapa. Inclui símbolos para partida, chegada, ponto de controlo, etc.
Cartografia específica para provas de Sprint
As provas de Sprint divergem em vários aspectos das mais longas e tradicionais formas de Orientação Pedestre. Enquanto as provas de Orientação são organizadas tradicionalmente em zonas de floresta, as provas de Sprint organizam-se normalmente em zonas de parque e terreno urbano. Esta expansão do clássico terreno de floresta para parques e zonas urbanas apresenta novos desafios à cartografia de Orientação. A Especificação Internacional para Mapas de Orientação (ISOM 2000) já contém símbolos que formam a base para a representação dessas zonas. No entanto, para assegurar competições justas de Sprint, esse conjunto de símbolos necessitou de uma revisão e extensão de forma a melhor incorporar as referidas zonas de parque e urbanas.
Existe um conjunto de razões para que a representação cartográfica do terreno para provas de Sprint necessite de uma abordagem diferente da utilizada para a representação do terreno de floresta clássico:
- Maior número de obstáculos que afectam a escolha de itinerários em parques e terrenos urbanos, como muros intransponíveis, áreas com acesso proibido ou estruturas com diversos níveis;
- Quantidade de detalhes em terreno urbano, particularmente no centro de cidades antigas, geralmente muito superior ao dos terrenos de floresta.
Na criação da especificação para mapas de Sprint, teve-se em consideração não apenas os novos tipos de terreno, mas também a finalidade do mapa. O formato dos mapas para estas provas foi definido pela IOF da seguinte forma:
“As provas de Sprint são rápidas, com maior visibilidade e mais fáceis de acompanhar. São provas em parques, ruas e florestas onde seja possível a corrida a alta velocidade. O tempo do vencedor, tanto masculino como feminino deverá ser entre 12 e 15 minutos, de preferência na zona inferior do intervalo.”
Assim, derivado das referidas restrições e obrigatoriedades, foi criado o ISSOM, com alguns princípios que, em certas situações, se afastam significativamente dos definidos no ISOM.
Cartografia específica para Orientação em BTT
Os mapas para Orientação em BTT baseiam-se nas especificações para os mapas de Orientação Pedestre. No entanto, de modo a respeitar as necessidades específicas do mapa face à natureza da Orientação em BTT, foi necessário criar algumas variações e suplementos às especificações para os mapas de Orientação Pedestre. Todas estas regras e símbolos especiais estão descritos no ISmtbOM (Especificação para Mapas de Orientação em BTT).
Como os atletas apenas podem circular por caminhos, só os pormenores que influenciem opções de percursos e localização, necessitam de ser representados no mapa.
Assim, por um lado os mapas de Ori-BTT têm de ter um sistema de classificação de caminhos mais detalhado; por outro, têm de omitir a maioria dos pormenores em terreno “livre” (fora dos caminhos) de modo a ser possível exagerar a rede de caminhos e carreiros e a simplificar a apresentação do relevo.
Classificação de caminhos
A Orientação em BTT requer duas classificações para caminhos e carreiros:
a) Velocidade (ou transitabilidade);
b) Largura.
Existem três classes para velocidade e duas classes para largura, num total de seis combinações.
Classificação da transitabilidade
Existem três níveis de classificação: FÁCIL, MÉDIO, DIFÍCIL.
Classificação da largura
Existem dois níveis de largura:
- Mais de 1,5m de largura (“Caminho”): pode ser utilizado por veículos de quatro rodas, carros, tractores, etc. É sempre possível ultrapassar ou cruzar com outros ciclistas;
- Menos de 1,5m de largura (“Carreiro”): muito estreito para um veículo de quatro rodas. É normalmente um carreiro pedestre.
Mapas para Orientação de Precisão (Trail-O)
Os mapas para a Orientação de Precisão são semelhantes aos mapas de Orientação Pedestre. A escala do mapa é normalmente de 1:5000 ou 1:4000, desenhado de acordo com as especificações convencionais (ISOM), com os símbolos ampliados para 150% (por vezes 200%) comparando com as dimensões dos mapas 1:15000. Esta dimensão de símbolos é semelhante à dos mapas de Sprint (ISSOM), podendo os mapas ser desenhados segundo esta especificação.
Embora se utilizem mapas de Orientação Pedestre, estes têm de ter uma precisão bastante elevada na zona dos pontos de controlo, visto que a resolução dos problemas aí colocados exigem uma análise mais detalhada do terreno e do mapa.
Relevo (castanho)
A forma do terreno é representada a castanho por curvas de nível detalhadas e por alguns símbolos especiais para representar cotas, depressões, etc. O relevo é complementado a preto com os símbolos para rochas e falésias.
Terreno rochoso e pedras (preto + cinzento)
A inclusão das rochas é útil para avaliar perigos e velocidades de progressão. Fornece também elementos para uma melhor leitura do mapa e para pontos de controlo. As rochas são representadas a preto para se distinguirem de outros elementos de relevo.
Água e pântanos (azul)
Este grupo inclui zonas aquáticas e tipos especiais de terreno criados pela presença de água (pântanos). A classificação é importante visto que indica o grau de dificuldade que se apresenta perante o orientista e fornece elementos (poços, nascentes e outros) para a leitura do mapa e para pontos de controlo.
Vegetação (verde + amarelo)
A representação da vegetação é importante para o orientista porque indica a velocidade de progressão e a visibilidade, fornecendo também elementos (árvores, troncos, etc) para a leitura do mapa.
Elementos construídos (preto)
A rede de caminhos fornece informação importante ao orientista e a sua classificação deve ser facilmente reconhecível no mapa. É particularmente importante a classificação de trilhos menores. Deve ser considerada não apenas a largura mas também a visibilidade do caminho para o orientista. Outros elementos construídos (casas, vedações, etc), são também importantes tanto para a leitura do mapa como para a colocação de pontos de controlo.
Símbolos dos percursos (magenta)
Conjunto de símbolos utilizados para a representação do percurso no mapa. Inclui símbolos para partida, chegada, ponto de controlo, etc.
Cartografia específica para provas de Sprint
As provas de Sprint divergem em vários aspectos das mais longas e tradicionais formas de Orientação Pedestre. Enquanto as provas de Orientação são organizadas tradicionalmente em zonas de floresta, as provas de Sprint organizam-se normalmente em zonas de parque e terreno urbano. Esta expansão do clássico terreno de floresta para parques e zonas urbanas apresenta novos desafios à cartografia de Orientação. A Especificação Internacional para Mapas de Orientação (ISOM 2000) já contém símbolos que formam a base para a representação dessas zonas. No entanto, para assegurar competições justas de Sprint, esse conjunto de símbolos necessitou de uma revisão e extensão de forma a melhor incorporar as referidas zonas de parque e urbanas.
Existe um conjunto de razões para que a representação cartográfica do terreno para provas de Sprint necessite de uma abordagem diferente da utilizada para a representação do terreno de floresta clássico:
- Maior número de obstáculos que afectam a escolha de itinerários em parques e terrenos urbanos, como muros intransponíveis, áreas com acesso proibido ou estruturas com diversos níveis;
- Quantidade de detalhes em terreno urbano, particularmente no centro de cidades antigas, geralmente muito superior ao dos terrenos de floresta.
Na criação da especificação para mapas de Sprint, teve-se em consideração não apenas os novos tipos de terreno, mas também a finalidade do mapa. O formato dos mapas para estas provas foi definido pela IOF da seguinte forma:
“As provas de Sprint são rápidas, com maior visibilidade e mais fáceis de acompanhar. São provas em parques, ruas e florestas onde seja possível a corrida a alta velocidade. O tempo do vencedor, tanto masculino como feminino deverá ser entre 12 e 15 minutos, de preferência na zona inferior do intervalo.”
Assim, derivado das referidas restrições e obrigatoriedades, foi criado o ISSOM, com alguns princípios que, em certas situações, se afastam significativamente dos definidos no ISOM.
Cartografia específica para Orientação em BTT
Os mapas para Orientação em BTT baseiam-se nas especificações para os mapas de Orientação Pedestre. No entanto, de modo a respeitar as necessidades específicas do mapa face à natureza da Orientação em BTT, foi necessário criar algumas variações e suplementos às especificações para os mapas de Orientação Pedestre. Todas estas regras e símbolos especiais estão descritos no ISmtbOM (Especificação para Mapas de Orientação em BTT).
Como os atletas apenas podem circular por caminhos, só os pormenores que influenciem opções de percursos e localização, necessitam de ser representados no mapa.
Assim, por um lado os mapas de Ori-BTT têm de ter um sistema de classificação de caminhos mais detalhado; por outro, têm de omitir a maioria dos pormenores em terreno “livre” (fora dos caminhos) de modo a ser possível exagerar a rede de caminhos e carreiros e a simplificar a apresentação do relevo.
Classificação de caminhos
A Orientação em BTT requer duas classificações para caminhos e carreiros:
a) Velocidade (ou transitabilidade);
b) Largura.
Existem três classes para velocidade e duas classes para largura, num total de seis combinações.
Classificação da transitabilidade
Existem três níveis de classificação: FÁCIL, MÉDIO, DIFÍCIL.
Classificação da largura
Existem dois níveis de largura:
- Mais de 1,5m de largura (“Caminho”): pode ser utilizado por veículos de quatro rodas, carros, tractores, etc. É sempre possível ultrapassar ou cruzar com outros ciclistas;
- Menos de 1,5m de largura (“Carreiro”): muito estreito para um veículo de quatro rodas. É normalmente um carreiro pedestre.
Mapas para Orientação de Precisão (Trail-O)
Os mapas para a Orientação de Precisão são semelhantes aos mapas de Orientação Pedestre. A escala do mapa é normalmente de 1:5000 ou 1:4000, desenhado de acordo com as especificações convencionais (ISOM), com os símbolos ampliados para 150% (por vezes 200%) comparando com as dimensões dos mapas 1:15000. Esta dimensão de símbolos é semelhante à dos mapas de Sprint (ISSOM), podendo os mapas ser desenhados segundo esta especificação.
Embora se utilizem mapas de Orientação Pedestre, estes têm de ter uma precisão bastante elevada na zona dos pontos de controlo, visto que a resolução dos problemas aí colocados exigem uma análise mais detalhada do terreno e do mapa.